
|
nRF24L01 &
PIC18F4220 |
|||
|
- page last modified, August 2012- (página en castellano)
|
| circuit for a varity of sensors |
|
|
|
Behind this project is the idea to have a small battery powered circuit of the size of only 5,2mm * 4,2mm capable to plug in a varieties of sensors, like accelerometer, gyro-meter, compass, temperature, etc., depending of the actual needs and sending the captured data wireless to the computer. The wireless data transfer is done using the nRF24L01 from Nordic. Attached, at the download- link at the bottom of this page is the code written in C for SourceBoost. I made sure that the code is nearly ANSI compatible so, with view modification one can use other compiler platforms to use the code. |
| enlarge
the electronic schematics of the circuit |
 |
|
The Nordic nRF24L01 costs 3,50E/unit compared to the xBee ZNet 2,5 of 45E/unit. The very small size and the costs made me do the effort to write the code. The first prototype unit I made with the nRF24L01 incorporated on the PCB of the main unit. (Photo DSCN0352_E_Web). As the battery acts like a shield of the circuits with this design I reached only a very small wireless rage of some meters, not enough to use the circuit for live performances. This is the reason that finally I bought a breakout board from Sparkfun and re-designed the circuit with the incorporated breakout board. |
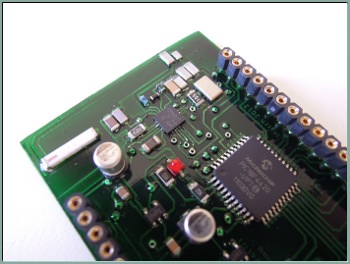 |
Photo of the protoptype version with a Nordic nRF24L01 incorporated. The battery acts like a shield for the radio waves, this is why it can't be used for live performances. (schematics General_Nordic_V1) |
| enlarge the electrical
schematics of "General_Nordic_V1" |
 |
| receiver/transmitter |
 |
 |
| enlarge the electronical
schematics "18F2420_nRF24L01" |
 |
| enlarge the electronical
schematics "Nordic_Receiver" |
 |
| manage incomming data with
SuperCollider |
| // first part
creates 6 sliders. ( var win= Window("ACCELOMETER", Rect(100, 100, 590, 420)); var sld0= Slider(win, Rect(20, 10, 50, 400)); var sld1= Slider(win, Rect(115, 10, 50, 400)); var sld2= Slider(win, Rect(215, 10, 50, 400)); var sld3= Slider(win, Rect(315, 10, 50, 400)); var sld4= Slider(win, Rect(415, 10, 50, 400)); var sld5= Slider(win, Rect(515, 10, 50, 400)); ~action_gui= {|chan, val| switch(chan, 0, {{sld0.value = val/1023}.defer}, // z (RA0) OLD version x, RA2 1, {{sld1.value = val/1023}.defer}, // y (RA1) 2, {{sld2.value = val/1023}.defer}, // x (RA2) OLD version z, RA0 3, {{sld3.value = val/1023}.defer}, // 4, {{sld4.value = val/1023}.defer}, // 5, {{sld5.value = val/1023}.defer} // ); }; win.front; ) SerialPort.listDevices // command to evaluate the USB port. // The next section is: // Incomming data with packages of 3bytes. 1.byte header 0x00, 2nd byte // hi data-byte, 3thd byte low data-byte. The 2nd byte incorporates also the // 6 address bites (64 addresses max) ( var port= SerialPort("/dev/ttyUSB0", 57600); //edit port here Routine({ var byte, loByte, hiByte, val, valsl, chan, index= 0; inf.do{ while({(byte= port.read).isNil}, {}); //wait for serial //byte.postln; //debug if(index==0 and:{byte==0}, { index= 1; }, { if(index==1, { hiByte= byte; index= 2; }, { if(index==2, { loByte= byte; //("received: hi:"+hiByte+" lo:"+loByte).postln; chan= (hiByte&2r11111100)>>2; // mask 2 lower data-bites val= ((hiByte&2r00000011)<<8)|loByte; //("chan:"+chan+"val:"+val).postln; ~action_gui.value(chan, val); ~action_synth.value(chan, val); index= 0; }); }); }); }; }).play; CmdPeriod.doOnce({port.close}); ) |
| code written by Fredrik
Olofsson |
|
NORDIC wireless nRF24L01 from Martin Hug on Vimeo. |
|
|
 |
download
the files associated with the project |